AGV制御システム
開発環境・使用技術
PC系(測定・演算・表示)
C#
制御系(設備制御)
Toyopuc nano
AGV通信
外部安全・インタロック
1. 概要
本AGVシステムは、工程間搬送を自動化することを目的とした無人搬送システムである。
AGVは無線LANを介してライン制御PLCおよび上位システムと通信し、各設備と連携しながら安全かつ効率的な搬送を実現する。
工程呼出、交差点制御、エリア別速度制御、充電管理、状態・位置の可視化を統合することで、
作業者の負担軽減、省人化、搬送ミス防止、稼働率向上に貢献する。
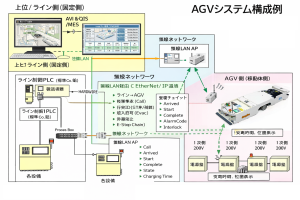
2. システム構成
3. 設備特徴
各設備との連携(ラインI/F):呼出、到着、投入許可、搬送完了、異常、非常停止など。
交差点制御(工場内):交差点進入許可・待機制御(AGV同士の干渉防止や交通整理用無線など。
エリア(空間)速度制御:通路幅・人混在・死角エリアなどをゾーン定義し、速度段階を自動切替(安全機能/エリア検知。
AGVとPLC通信(無線Ethernet):工場無線LAN経由でEtherNet/IP等によりPLCデータを送受信。
4. 外部機器通信仕様
AGV ⇔ PLC インターネット(TCP/IP)
PLC ⇔ AGV EtherNet/IP
PLC ⇔ 外部設備 EtherNet/IP
PLC ⇔ 安全インタロック FNET

