アライメントテスタ
開発環境・使用技術
PC系(測定・演算・表示)
C#
VC++
C++
制御系(設備制御)
PLC
Toyopuc/Sharp PLC
動作
安川サーボ/川重ロボット
ナットランナー用制御プログラム
距離センサ
Perceptron(パーセプトロン)
GOCATOR
1. 概要
アライメントテスタは、車両タイヤの取付角度・高精度に測定する設備です。(トー、キャンパー、スラスト)
アライメント状態は走行安定性・安全性・タイヤ摩耗に直結するため、車検・完成検査・整備工程で重要な検査項目です。
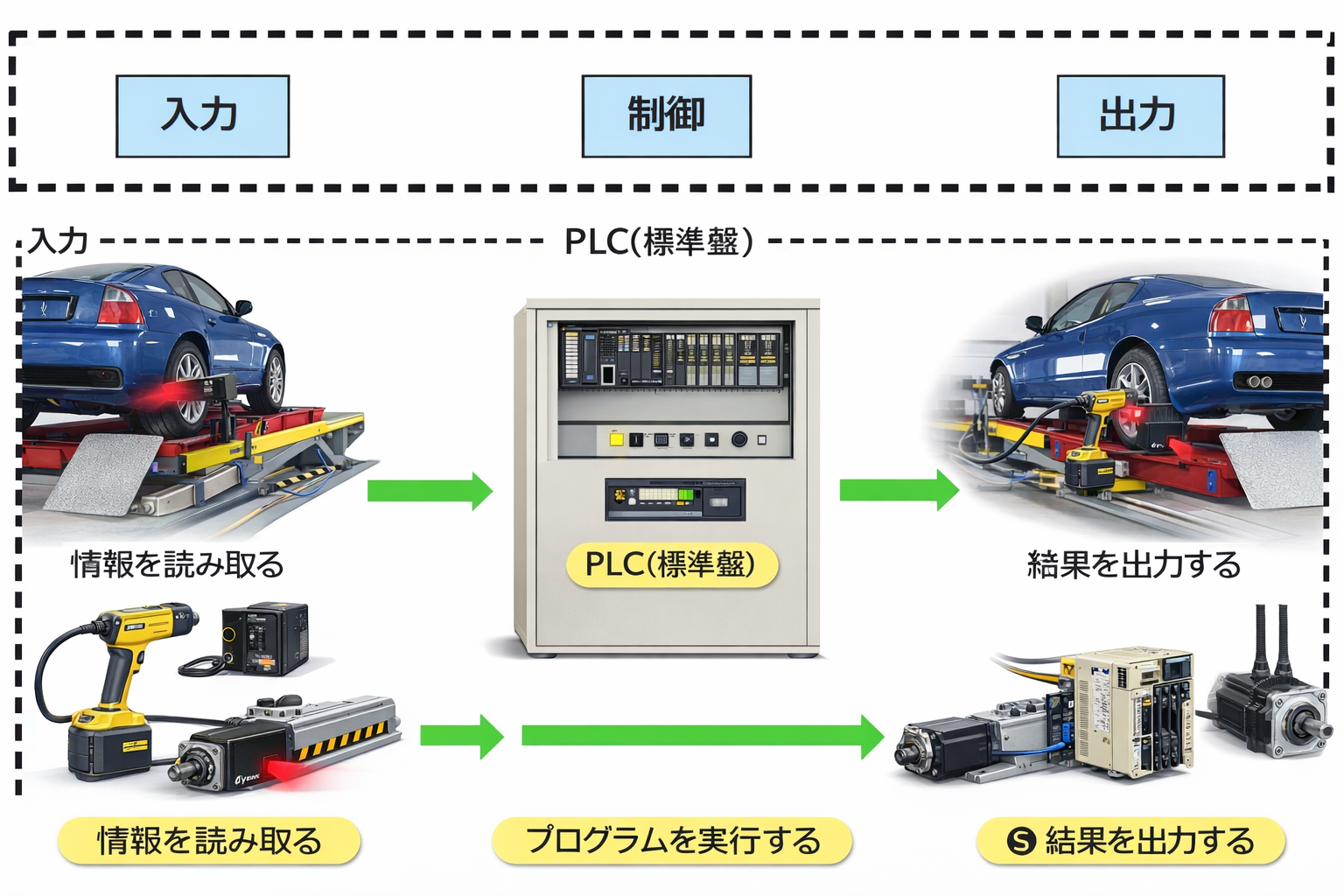
2. 全体構成
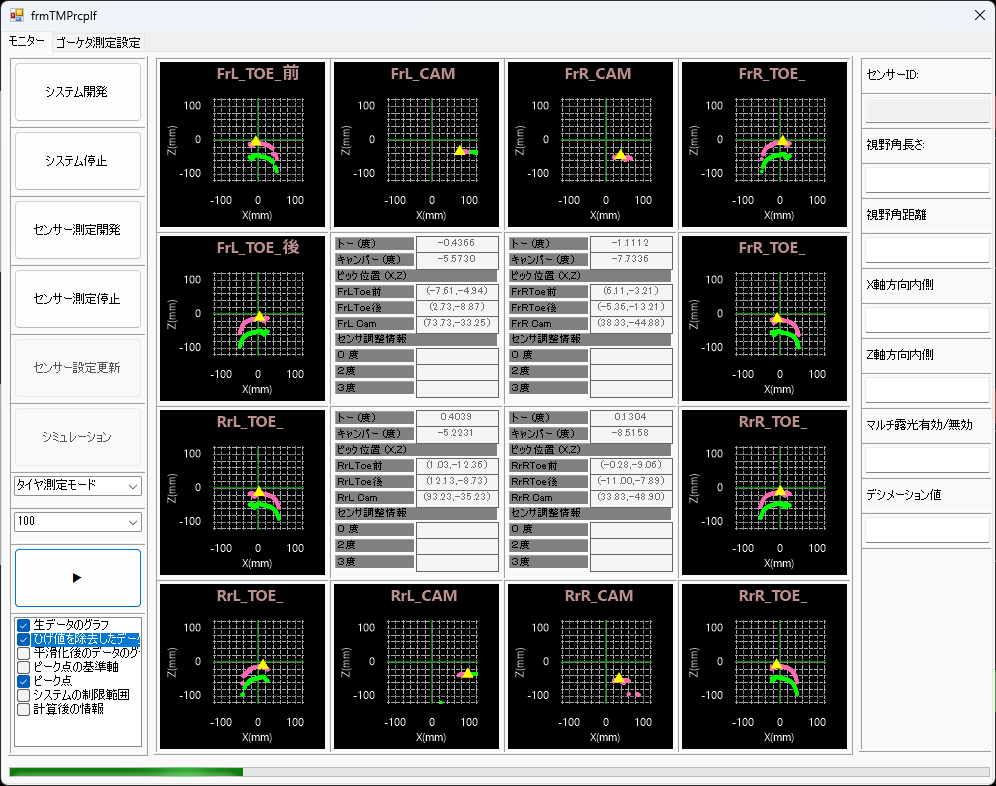
3. 設備特徴
距離測定センサ(Gocator、Perceptron 等)を使用し、タイヤ側面をスキャン
スキャン結果から高分解能な点群データを取得
点群データより代表位置(ピーク値)を抽出
前後センサの距離差をもとにトー角(またはトー量)を演算
演算結果を車種別基準値と比較し、調整・OK/NG判定を実施
NR(Atlas Copco製ナットランナー)による締付工程に対応
4. 外部機器通信仕様
距離測定センサ通信
PerceptronおよびGocatorとはEthernet通信で接続し、
センサSDKを使用して高分解能な点群データ・距離データをリアルタイム取得。
ナットランナー通信
Atlas Copco製ナットランナーとはEthernet(TCP/IP)通信により接続し、
締付開始指令、トルク・角度結果、OK/NG情報を取得。
PLC通信
PLCとは設備構成・ライン仕様に応じて、
TCP/IPまたはRS-232C通信を使用し、工程進行・状態監視・インターロック制御を行い。
サーボ通信
安川サーボモータとはRS-232C通信により接続し、
測定位置・ガイド機構の位置指令および状態監視を行い。
上位PC通信
アライメントテスタ測定ソフト(上位PC)は、Ethernet(TCP/IP)通信により
各機器およびPLCと接続し、測定制御・演算結果・判定結果の送受信を行い。